A teraz napiszmy kilka linijek kodu aby wykrywać obecność ludzi w łazience.
Budowa aplikacji
Nasz projekt będzie składał się z następujących plików:
- bbmagic_lib_1.2.a to biblioteka obsługująca moduły BBMagic przez interfejs Bluetooth Low Energy – dla Raspberry Pi zero W i Raspberry Pi 3, które posiadają chipset bluetooth.
- bbmagic_lib.h to plik nagłówkowy biblioteki bbmagic_lib zawierający definicje potrzebnych stałych
- libbluetooth.a to biblioteka z pakietu libbluetooth-dev Debiana zawierającego pliki deweloperskie używane z biblioteką BlueZ. Powinieneś ja mieć już na swojej Malinie, ale gdybyś nie miał to dla ułatwienia zawieramy ją w naszym projekcie.
- bbmagic_motion_sketch.c to plik aplikacji, który właśnie napiszemy
- Makefile to plik z instrukcjami dla programu make kontrolującego przebieg kompilacji
Przygotowanie projektu
W swoim katalogu domowym stwórz nowy katalog dla naszego projektu: mkdir bbmagic_motion_sketch
i przejdź do niego cd bbmagic_motion_sketch
Otwórz swój ulubiony edytor. Jeśli jeszcze nie masz ulubionego otwórz nano – jest prosty i intuicyjnynano bbmagic_motion_sketch.c
Piszemy program dla BBMagic MOTION
1. Załączamy niezbędne pliki nagłówkowe oraz wstawiamy funkcję main#include <stdlib.h>
#include <stdio.h>
#include <unistd.h>
#include <time.h>
#include "bbmagic_lib.h"
int main(void)
{
2. Deklarujemy potrzebne zmienneunsigned char bbm_buf[BBLIB_FRAME_SIZE] ;
int i, adc1, adc2, data_length ;
float vcc_f ;
time_t timestamp ;
struct tm *loctime ;
char time_buffer[TIME_BUF_SIZE] ;
- bbm_buf – bufor na dane od modułu BBMagic – rozmiar bufora BBLIB_FRAME_SIZE zdefiniowany jest w pliku 'bbmagic_lib.h’
- vcc_f – zawierać będzie wartość napięcia zasilania modułu BBMagic MOTION
- adc1, adc2 – dla zmierzonych napięć na wejściach ADC_1 i ADC_2
- timestamp,*loctime, time_buffer[TIME_BUF_SIZE] – do wyświetlenia czasu
- i, data_length – liczniki danych
3. Sprawdzamy zgodność wersji biblioteki bbmagic_lib.
Jeśli to wersja 0x0102 to jest ok – nasz program jest z nią kompatybilny.
i = bbm_bt_lib_version() ;
printf("bbm_lib_version: %0.4X - ",i) ;
if(i == 0x0102) printf("ok\n") ;
else
{
printf("nok - stop\n\n") ;
exit(1) ;
}
4. Włączamy komunikację Bluetooth przy użyciu funkcji z biblioteki 'bbmagic_lib_1.2′.
Wszystkie dostępne funkcje zawarte są w pliku 'bbmagic_lib.h’.
i = bbm_bt_open(17) ;
if(i) exit(2) ;
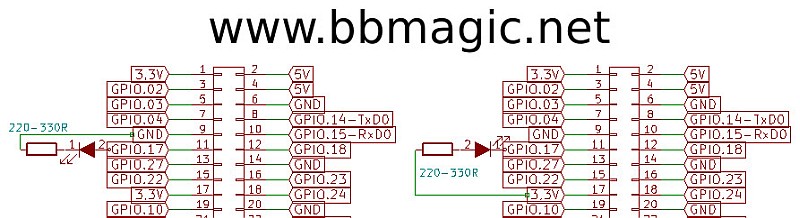
Argumentem funkcji jest numer pinu Raspberry Pi, do którego podłączona będzie dioda sygnalizująca transmisję danych od modułów BBMagic.
Jeśli zawiera się w przedziale od 1 do 27 sygnalizacja zostanie włączona na wskazanym pinie. Jeśli jest równy zero lub większy niż 27 sygnalizacja nie zostanie włączona.
Diodę LED podłączyć można na dwa sposoby:
do
{
data_length = bbm_bt_read(bbm_buf) ;
if(data_length > 0)
{
Jeśli odebrano dane to znajdują się one w buforze 'bbm_buf’, a zmienna 'data_length’ pamięta liczbę odebranych bajtów.
Podstawowe wartośći, które funkcja bbm_bt_read(..) może zwrócić to:
- data_length < 0 : odebrano 'data_length’ bajtów danych od modułu BBMagic
- data_length == 0 : nie odebrano danych od modułu BBMagic
- data_length == -1 : użytkownik przerwał program naciskając 'ctrl+c’
- data_length == -10 : odebrane dane od modułu BBMagic nie są autentyczne. Niezgodny podpis cyfrowy.
Wszystkie możliwe wartośći, które funkcja bbm_bt_read(..) może zwrócić zawiera plik 'bbmagic_lib.h’.
6. Sprawdzamy czy odebrane dane pochodzą od BBMagic MOTION.
switch(bbm_buf[BBMAGIC_DEVICE_TYPE])
{
case BBMAGIC_M_MOTION :
Stałe 'BBMAGIC_DEVICE_TYPE’ oraz 'BBMAGIC_M_MOTION’ zdefiniowane są w pliku 'bbmagic_lib.h’.
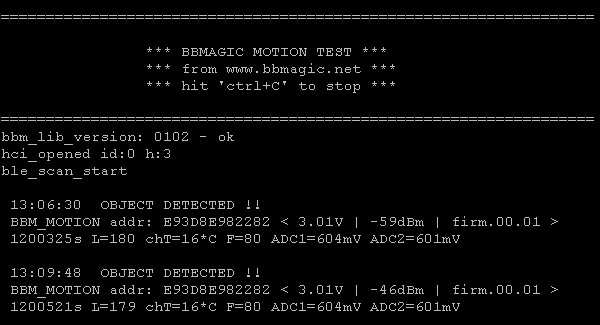
7. Wyświetlamy czas zdarzenia
timestamp = time(NULL) ; //-pobierz aktualny czas
loctime = localtime(×tamp) ; //-konwertuj na czas lokalny
strftime (time_buffer, TIME_BUF_SIZE, "%X", loctime) ; //-konwertuj na ciag znakow
printf("\n %s ", time_buffer) ; //-wyślij na terminal
8. Sprawdzamy flagę wykrycia obiektu.
Jeśli flaga ustawiona wyświetl informację:if(bbm_buf[BBM_MOTION_FLAGS] & BBM_MOTION_ALERT_MASK)
{
printf(" OBJECT DETECTED !!") ;
}
Stałe 'BBM_MOTION_FLAGS’ oraz 'BBM_MOTION_ALERT_MASK’ zdefiniowane są w pliku 'bbmagic_lib.h’.
9. Konwertujemy i wyświetlamy informacje przysłane przez BBMagic MOTION.
- Nazwa modułu, który przysłał dane:
printf("\n BBM_MOTION addr: ") ; - Sześciobajtowy adres modułu
for(i=0; i<BBM_BT_ADDR_SIZE; i++)
printf("%0.2X", bbm_buf[BBMAGIC_DEVICE_ADDR_5 + i]) ; - Przeliczamy i wypisujemy wartość napięcia zasilania
vcc_f = (float)bbm_buf[BBM_MOTION_V_SUP] ; vcc_f/=BBMAGIC_VCC_DIVIDER ;
printf(" < %0.2fV", vcc_f) ; - Moc odbieranego sygnału
printf(" | %ddBm", (signed char)bbm_buf[BBMAGIC_DEVICE_RSSI]) ;
- Wersja firmware'u modułu BBMagic MOTION:
printf(" | firm.%0.2X.%0.2X",bbm_buf[BBM_MOTION_FIRM_1], bbm_buf[BBM_MOTION_FIRM_0]) ;
printf(" >\n") ; - Czas pracy modułu od momentu włączenia zasilania w sekundach
i =bbm_buf[BBM_MOTION_WORKTIME_3] ; i<<=8 ;
i |=bbm_buf[BBM_MOTION_WORKTIME_2] ; i<<=8 ;
i |=bbm_buf[BBM_MOTION_WORKTIME_1] ; i<<=8 ;
i |=bbm_buf[BBM_MOTION_WORKTIME_0] ;
printf(" %4ds",i) ;
- Poziom oświetlenia, temperaturę chipu oraz flagi
printf(" L=%d chT=%d*C F=%0.2X", bbm_buf[BBM_MOTION_LIGHT], (signed char)bbm_buf[BBM_MOTION_CHIP_TEMP], bbm_buf[BBM_MOTION_FLAGS]) ;
- Wartości zmierzonego napięcia na wejściach ADC_1 i ADC_2
adc1 =bbm_buf[BBM_MOTION_ADC_1_MSB] ; adc1 *=256 ; adc1 +=bbm_buf[BBM_MOTION_ADC_1_LSB] ;
adc2 =bbm_buf[BBM_MOTION_ADC_2_MSB] ; adc2 *=256 ; adc2 +=bbm_buf[BBM_MOTION_ADC_2_LSB] ;
printf(" ADC1=%dmV ADC2=%dmV", adc1, adc2) ;
10. Zamykamy switch'a.
Jeśli odebrane zostaną dane od innego modułu BBMagic to wyświetlamy jego adres i typ.
default:
printf("BBM_UNKNOWN_") ;
for(i=0; i<BBM_BT_ADDR_SIZE; i++) printf("%0.2X", bbm_buf[BBMAGIC_DEVICE_ADDR_5 + i]) ;
printf(" BBM_TYPE=%0.2X", bbm_buf[BBMAGIC_DEVICE_TYPE]) ;
break ;
} ;
11. Zamykamy if(data_length > 0)
Wyświetlamy znak nowej linii aby funkcja 'printf' wysłała zawartość swojego bufora na ekran i zamykamy 'if'a'
printf("\n") ;
}
12. Zamykamy do{
Czekamy 100 mikrosekund i wykoujemy całą pętlę odczytującą i wyświetlającą dane aż do momentu naciśnięcia przez użytkownika 'ctrl+c' (funkcja bbm_bt_read(..) zwróci -1)
usleep(100) ;
}while(data_length != -1) ;
13. Zamykamy komunikację bluetooth i kończymy program
Jeśli użytkownik nacisnął kombinację klawiszy 'ctrl+c' zamykamy komunikację bluetooth i kończymy program.
bbm_bt_close() ;
exit(0) ;
}
Mamy to !!
Naciśnij 'ctrl+X', a następnie 'Y' i 'Enter' aby zapisać plik bbmagic_motion_sketch.c.
Teraz wystarczy skompilować aplikację. Plik Makefile powinien wyglądać tak:
PRG =bbmagic_motion_sketch
BBM_LIB =bbmagic_lib_1.2
all: clean
gcc -o $(PRG) $(PRG).c $(BBM_LIB).a libbluetooth.a
clean:
rm -f $(PRG)